Walk this way
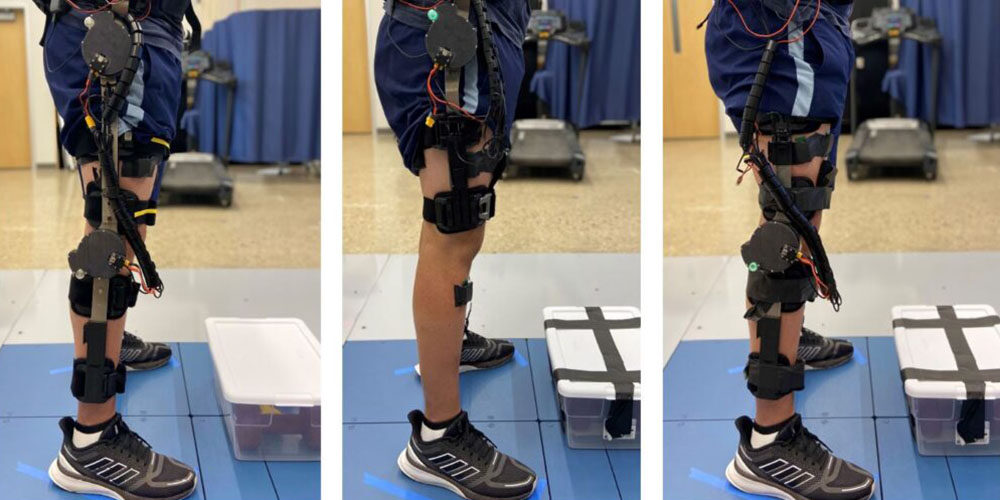
In an effort to bring robotic assistance to workers, the elderly, and more, a U-M team is developing a new type of powered exoskeleton for lower limbs—funded by $1.7 million from the National Institutes of Health.
One in eight Americans faces a mobility disability, with serious difficulty walking or climbing stairs, but a robotic solution could be far less bulky than sci-fi’s full-body suits. The U-M team plans to develop a modular, powered exoskeleton system that could be used on one or multiple joints of the legs. The three-year project will first study workers who lift and lower objects and the elderly who have lost mobility with age. In future work, the team would like to include people with other disabilities.
“Imagine adding a small motor to a bicycle — the rider still pedals, but there’s that extra power to get up hills without breaking too much of a sweat,” says project lead Robert Gregg, associate professor of electrical and computer engineering.“Similarly, we can take the conventional ankle, hip, or knee braces used today, add a self-contained specialized motor and gear system, and provide power at a specific joint to increase mobility.”
Conventional braces, or orthotics, cannot actively assist human joints during challenging activities. State-of-the-art exoskeletons, on the other hand, are built in a way that makes it difficult for users to move against the motor, also known as backdriving the motor. This is in part because these exoskeletons are usually designed to replace the complete function of an entire limb. Partially assisting specific joints is a different challenge.However, one of the greatest hurdles for exoskeletons is that they must accurately recognize the user’s intent, and match that intent with a correct action. Otherwise, the exoskeleton adds to the effort required from the user.
“There is a continuum of human movement possibilities, from jumping jacks to walking up a slightly different incline. If the exoskeleton recognizes the wrong activity, then it’s getting in the way of the human,” Gregg says.
Motor skills
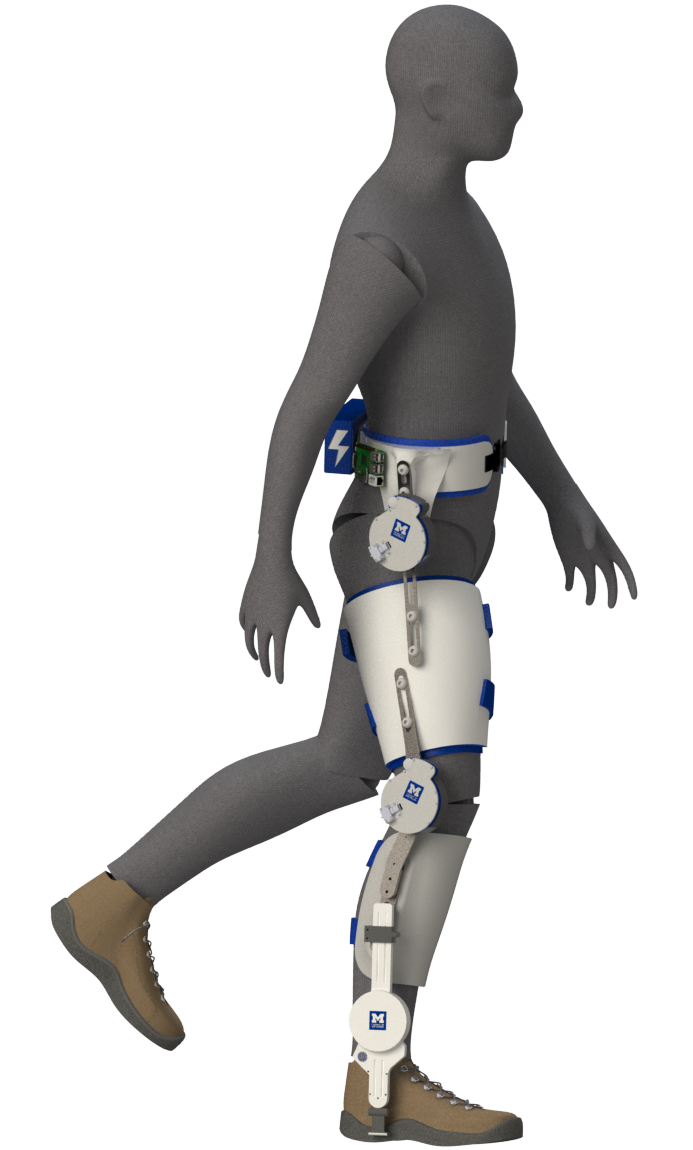
A model of the powered exoskeleton on the hip, knee, and ankle joints. The modular system will be able to assist any combination of these joints, no matter the activity. (Image credit: Locomotor Control Systems Laboratory, U-M.)
There are two keys to the system Gregg and his team envision will make up for these shortcomings: a newer style of motor and transmission and a different kind of control algorithm.
The challenge with the motor is delivering enough torque — the exoskeleton equivalent of muscle strength — while being small and lightweight enough to wear. Usually, this is achieved by using a small motor that spins quickly and converting that speed into torque with a highly-geared transmission. That transmission makes it hard for a user to move against the motor.
Gregg’s team will solve this problem by using flat, “pancake” style motors that were originally utilized in drones and have more recently been used in the Open Source Leg — a project from team member Elliott Rouse, assistant professor of mechanical engineering. These motors don’t need as many gears to deliver enough torque to help power a human, which makes them easy to backdrive.
To control the motor and transmission, the team will develop a “task-invariant” control algorithm, which will not rely on knowing the task the user is trying to complete in order to effectively provide assistance.
“You have to make sure that when you tell the motor what to do, it’s not fighting the human, but that’s a big challenge because you don’t always know the human’s intent,” Gregg says. Instead of predicting where a human will move, the team will simplify the problem and work on altering how the human moves.
“With this method, we may compensate for gravity: no matter where you move, the motor can assist with that. Another example is inertia: no matter where you move, the motor can compensate for limb inertia to make movement easier,” Gregg says.
Working with Chandramouli Krishnan, an associate professor of physical medicine and rehabilitation, and Alicia Foster, a certified prosthetist orthotist at U-M’s Orthotics and Prosthetics Center, the team will determine the best configurations of the modular system for different populations. The team will also study whether the additional weight of the motor is helpful overall.
Gregg hopes the project will result in a low-cost system that any clinician would be able to replicate by simply adding it to current off-the-shelf ankle, hip, and knee orthoses. And beyond the workers and elderly populations of this project, Gregg hopes the system could be helpful to the broad populations that require just a bit, but not complete, assistance with getting around.
The project is funded by NIH grant 1R01EB031166-01, “Enhancing Voluntary Motion in Broad Patient Populations with Modular Powered Orthoses.” Gregg, Rouse, and Krishnan are also members of the U-M Robotics Institute.

Stephen Schewe - 1967 BSEME
I have Charcot Marie Tooth (CMT), which severely weakens my extremities. It would be amazing if this powered device worked for me and others with mobility problems. I wear carbon fiber AFOs now, which certainly help a lot.
I am 77 and wear hearing aids. They really help me hear so much more “normally”. I feel that this powered exoskeleton idea is the same kind of idea…an electro/mechanical device which improves the life experience of the wearer, Go Blue!
Reply
Robbie shaw
I feel your situation; My son has CMT and I agree…sounds very encouraging.
Reply
oliver genn - 1961
This sounds promising….hope it is completely developed very soon.
Reply
Mercedes Kelly - '75 MSW
Will the program be using volunteers?
Reply
SANFORD HOFFMAN - 1961
Am an 81 yo physician with numerous hip surgeries and spinal stenosis which limits my ability to walk long distances
This would be a wonderful technology
I would be happy to be involved in a trial for the exoskeleton
Reply
Robert Gregg
Please email Dr. Gregg at rdgregg@umich.edu if interested in hearing about future trial enrollment. Keep in mind these initial studies will include a somewhat limited patient population, but we hope to expand into additional populations soon.
Reply
Jim King - 1964E
I am a paraplegic as a result of a spinal cord injury. As a part of my physical therapy I am “walking” with a set of full leg braces. However, this results in a “Frankenstein” sort of walk where I am swinging my legs from the hip that is both exhausting and unfit for use outside of a PT setting. I would be quite interested in participating in the project.
Reply
Paul Churchill - 1994
Sounds like a great project. It sounds very similar to the work that Ekso Bionics is doing to help people with spinal cord injuries (in association with the Wings for Life Foundation). Below is a post from a friend (Tarek Rasouli) who walked for the first time in 18 years with the help of their exoskeleton. You may already be aware of this work, but I thought I would pass it along nonetheless.
https://www.linkedin.com/posts/tarekrasouli_ekso-rehab-medicalresearch-activity-6724933645318033408-3VMY
Reply
Jazell Jackson
I have Charcot Marie Tooth (CMT). It would be amazing to have this assistance. It could possibly keep me mobile. I would like to be a test subject for this! It could mean a big improvement in the quality of life!
Reply
William Ramsey - 1975
I also have CMT and this would be so beneficial to expand my mobility. Getting off the ground or floor is nearly impossible. If you want to test on subjects I’m placing my hat in the ring as a candidate. Thank you for your consideration
Reply
Ben Aguilar - None... 11th grade joined military
I am suffering from myositis…a side affect caused by taking statins. ( Cholesterol pills ) Myositis affects most of your muscles by killing the muscle fibers…leaving you with little or no strength to do simple tasks walking bending
over reaching for things above your head…I’m just screwed all the way around with this problem… I was self-employed doing remodeling work at 65 I’m now 67. Looking for anything that can help me become more mobile… Thank you
Reply
Chuck Mitchell - Not sure what to put here
I am a 75 yr old retired Fighter Pilot. 100% disability back& neck stenosis, numerous surgeries from hi G flying. I have only 1/2 quad muscle usable right leg, injured crim fall. 2 canes on good day, normally walker.
The thought of an exoskeleton aid to help me to walk again gives me gives me great hope.
I am available 24/7 for consultation, testing, or anything else. If I can come there, I have my credit in hand. I am motivated and ready.
Chuck 520-237-2112
Reply